A teljesítmény optimalizálása az MPU-6050-rel: Beállítás, kalibrálás és alkalmazások
2024-04-25
9242
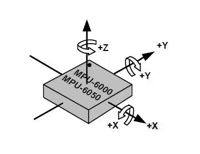
MPU-6050 a világ első integrált 6 tengelyes mozgásfeldolgozó komponense, amely integrálja a 3 tengelyes giroszkópot, a 3 tengelyes gyorsulásmérőt és a skálázható digitális mozgásprocesszorot (DMP).A használatának célja az objektum dőlési szögének (például egy quadcopter, egy kiegyensúlyozó autó) megszerzése az x, y és z tengelyeken, azaz a hangmagasság szögét, a gördülő szöget és a jaw szöget.Az I2C interfészen keresztül elolvassuk az MPU-6050 (háromtengelyes gyorsulási hirdetési érték és háromtengelyes szögsebesség-hirdetési érték) hat adatait.A testtartás fúziós feldolgozása után kiszámítható a hangmagasság, a tekercs és a tekercs szöge.A mérési értékek irányított referenciájaként az érzékelő koordináta irányának meghatározása az alábbi ábrán látható, amely a jobbkezes koordinátarendszer elvét követi (vagyis a jobb hüvelykujj az X- pozitív irányra mutattengely, a mutatóujj az y tengely pozitív irányára, a középső ujj pedig a z-tengely pozitív irányára mutat.
Katalógus
A dedikált I2C érzékelő busszal az MPU-6050 képes közvetlenül egy külső 3 tengelyes iránytűből, amely teljes 9 tengelyes MotionFusion ™ kimenetet biztosít.Kiküszöböli a kombinált giroszkóp és a gyorsító ütemterv közötti eltérési problémát, és jelentősen csökkenti a csomagolási helyet a többkomponensű oldatokhoz képest.Ha egy háromtengelyes magnetométerhez van csatlakoztatva, az MPU-60X0 képes teljes 9 tengelyes mozgásfúziós kimenetet biztosítani a Main I2C vagy SPI portjához (vegye figyelembe, hogy az SPI port csak az MPU-6000-en érhető el).
Alternatívák és ekvivalensek
- MPU-3300
- MPU-6000
- MPU-6500
MPU-6050 gyártója
Az MPU-6050 gyártója TDK.Miután a TDK két alapítója, Dr. Yogoro Kato és Takei Takei feltalálta a Ferritet Tokióban, alapították Tokyo Denkikagaku Kogyo K.K.1935 -ben. Globális elektronikai ipar márkaként a TDK mindig domináns pozíciót tartott az elektronikus alapanyagok és az elektronikus alkatrészek területén.A TDK átfogó és innováció által vezérelt termékportfóliója olyan passzív alkatrészeket fed le, mint a kerámia kondenzátorok, az alumínium elektrolit kondenzátorok, a filmkondenzátorok, a mágneses termékek, a magas frekvenciájú alkatrészek, a piezoelektromos és védelmi eszközök, valamint az érzékelők és az érzékelők (például a hőmérséklet és a nyomás, például a nyomás és a nyomásMágneses és MEMS érzékelők) stb. Ezenkívül a TDK tápegységeket és energiakészülékeket, mágneses fejeket és egyéb termékeket is biztosít.Termékmárkái között szerepel a TDK, az EPCOS, az Invensense, a Micronas, a Tronics és a TDK-Lambda.
Az MPU-6050 belső blokkdiagramja
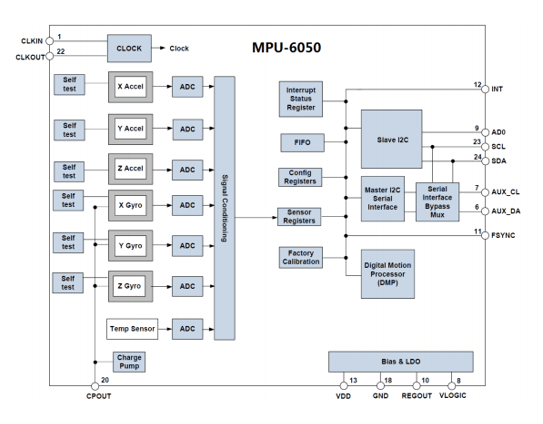
Közülük az SCL és az SDA az MCU-hoz csatlakoztatott IIC interfészek, és az MCU ezen a IIC felületen keresztül vezérli az MPU-6050-et.Van egy IIC interfész is, nevezetesen aux_cl és aux_da.Ez a felület felhasználható a külső rabszolga eszközök, például a mágneses érzékelők csatlakoztatására, hogy kilenc tengelyes érzékelőt képezzenek.A vlogic az IO port feszültsége.Ez a PIN -kód legalább 1,8 V -ot képes támogatni.Általában közvetlenül csatlakoztatjuk a VDD -hez.Az AD0 a rabszolga IIC interfész címvezérlő csapja (csatlakoztatva az MCU -hoz).Ez a PIN -kód vezérli a IIC cím legalacsonyabb részét.Ha csatlakozik a GND-hez, akkor az MPU-6050 IIC címe 0x68;Ha csatlakozik a VDD -hez, akkor 0x69.Felhívjuk figyelmét, hogy az itt szereplő cím nem tartalmazza a legalacsonyabb adatátvitelt (a legalacsonyabb bit az olvasási és írási műveletek ábrázolására).Az MWBALancedSTC15-en az AD0 csatlakozik a GND-hez, tehát az MPU-6050 IIC címe 0x68 (a legalacsonyabb bit kivételével).
Inicializálja a IIC felületet
Az MPU-6050 az IIC-t használja az STC15-mel való kommunikációhoz, ezért először inicializálnunk kell az MPU-6050-hez csatlakoztatott SDA és SCL adatvonalakat.
Reset MPU-6050
Ez a lépés visszaállítja az MPU-6050 összes nyilvántartását az alapértelmezett értékekhez, amelyet az 1 (0x6b) Bit7 bit7-re történő írásával érnek el.A visszaállítás után az 1. energiagazdálkodási nyilvántartást az alapértelmezett értékre (0x40) kell visszaállítani, és ezt a nyilvántartást később 0x00-ra kell állítani, hogy felébreszthesse az MPU-6050-et, és normál működő állapotba kerüljön.
Állítsa be a szögsebesség-érzékelő (giroszkóp) és a gyorsulási érzékelő teljes skálájának tartományát
Ebben a lépésben beállítjuk a két érzékelő teljes skálájú tartományát (FSR) a Gyroscope konfigurációs regiszter (0x1B) és a gyorsulás-érzékelő konfigurációs regiszter (0x1C) segítségével.Általában a giroszkóp teljes skálájú tartományát ± 2000 dps-re és a gyorsulásmérő teljes skálájára ± 2G-re állítjuk.
Állítsa be az egyéb paramétereket
Itt a következő paramétereket is konfigurálnunk kell: Kapcsolja ki a megszakításokat, tiltsa le az AUX I2C interfészt, tiltsa le a FIFO-t, állítsa be a giroszkóp mintavételi sebességét, és konfigurálja a digitális alacsony áteresztési szűrőt (DLPF).Mivel nem használjuk a megszakításokat az adatok olvasásához ebben a fejezetben, a megszakító funkciót ki kell kapcsolni.Ugyanakkor, mivel nem az AUX I2C felületet használjuk más külső érzékelők csatlakoztatásához, be kell zárnunk ezt a felületet is.Ezeket a funkciókat a megszakítás engedélyezési regiszter (0x38) és a felhasználói vezérlő regiszter (0x6a) segítségével lehet szabályozni.Az MPU-6050 felhasználhatja a FIFO-t az érzékelő adatok tárolására, de ebben a fejezetben nem használtuk, tehát minden FIFO csatornát bezárni kell.Ez a FIFO Enable Register (0x23) segítségével vezérelhető.Alapértelmezés szerint a regiszter értéke 0 (azaz a FIFO le van tiltva), így az alapértelmezett értéket közvetlenül használhatjuk.A giroszkóp mintavételi sebességét a mintavételi sebesség -elválasztó nyilvántartás (0x19) szabályozza.Általában ezt a mintavételi sebességet 50-re állítjuk. A digitális aluláteresztő szűrő (DLPF) konfigurációja a konfigurációs nyilvántartáson (0x1a) fejeződik be.Általánosságban elmondható, hogy a DLPF -et a sávszélesség felére állítjuk, hogy kiegyensúlyozzuk az adatok pontosságát és a válaszsebességet.
Konfigurálja a rendszer óraforrását, és engedélyezze a szögsebesség -érzékelőt és a gyorsulási érzékelőt
A rendszer óraforrásának beállítása az 1 (0x6b) energiagazdálkodási nyilvántartástól függ, ahol a regiszter legalacsonyabb három bitje határozza meg az óraforrás kiválasztását.Alapértelmezés szerint ez a három bit 0 -ra van állítva, ami azt jelenti, hogy a rendszer a belső 8MHz -es RC oszcillátort használja az óraforrásként.Az óra pontosságának javítása érdekében azonban gyakran 1-re állítjuk, és az x tengelyes giroszkóp PLL-t választjuk az óraforrásként.Ezenkívül a szögsebesség -érzékelő és a gyorsulási érzékelő engedélyezése szintén fontos lépés az inicializálási folyamatban.Mindkét műveletet a Power Management 2 (0x6C) keresztül hajtják végre.Egyszerűen állítsa a megfelelő bitet 0 -ra a megfelelő érzékelő aktiválásához.A fenti lépések elvégzése után az MPU-6050 beírhatja a normál működési állapotot.Azok a nyilvántartások, amelyek nem állnak rendelkezésre, a rendszer által előre beállított alapértelmezett értékeket fogadják el.
Hogyan működik az MPU-6050?
Giroszérzékelő
Az érzékelő egy giroszkóppal van felszerelve, amely a giroszkópos hatás miatt mindig párhuzamosan marad a kezdeti irányba.Ezért kiszámolhatjuk a forgási irányt és a forgási szöget, ha észleljük a giroszkóp kezdeti irányát.
Gyorsulásmérő -érzékelő
A gyorsulásmérő -érzékelő olyan eszköz, amely képes mérni a gyorsulást, és a piezoelektromos hatás elvén alapul.A gyorsulás során az érzékelő méri a tömegblokkra alkalmazott inerciális erőt, majd a Newton második törvényének felhasználásával kiszámítja a gyorsulási értéket.
Digitális mozgásprocesszor (DMP)
A DMP egy adatfeldolgozó modul az MPU6050 chipben, amely beépített Kalman szűrő algoritmussal rendelkezik az adatok megszerzésére a giroszkóp és a gyorsulásmérő érzékelőktől, valamint a kimeneti kvaternionok feldolgozására.Ez a szolgáltatás nagymértékben csökkenti a perifériás mikroprocesszor munkaterhelését, és elkerüli az unalmas szűrési és adatfúziós folyamatot.
Megjegyzések:
Quaternions: A kvaternerok egyszerű szuperkomplex számok.A komplex számok valós számokból és a képzeletbeli I egységből állnak, ahol i^2 = -1.
Hol használják az MPU-6050-et?
- Játékok
- kézibeszélő és hordozható játék
- Mozgás alapú játékvezérlők
- Blurfree ™ technológia (videó/csendes képstabilizáláshoz)
- AirSign ™ technológia (a biztonság/hitelesítés)
- Instantgesture ™ IG ™ gesztusfelismerés
- hordható érzékelők az egészség, a fitnesz és a sport szempontjából
- Mozgás-kompatibilis játék- és alkalmazáskeretrendszer
- MotionCommand ™ technológia (gesztus rövidítésekhez)
- Helyalapú szolgáltatások, érdekes pontok és halott számolás
- 3D távvezérlők az internethez csatlakoztatott DTV -khez és beállítva a felső dobozokat, 3D egerek
- A TouchAnywhere ™ technológia (a „No Touch” UI alkalmazásvezérléshez/navigációhoz)
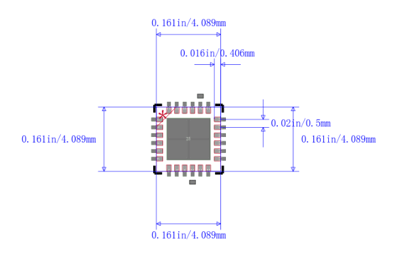
Az MPU-6050 csomagja
Hogyan lehet csökkenteni az MPU-6050 zaját?
A következő módszereket tehetjük meg az MPU-6050 zajának csökkentésére.
Használjon kalibrált érzékelőket
Az MPU-6050 gyorsulásmérő és giroszkóp kalibrálása kiküszöböli maguk az érzékelők torzulását és hibáját, ezáltal csökkentve ezzel a zaj hatását.A kalibrációs folyamat általában két szakaszból áll: statikus kalibrálás és mozgás kalibrálás.
Hardver szűrési folyamat
A szűrő kondenzátorok hozzáadása az MPU-6050 tápvezetékéhez csökkentheti a tápegység zajának az érzékelőre gyakorolt hatását.Időközben a PCB elrendezése során meg kell próbálnunk tartani az MPU-6050-et a potenciális interferenciaforrásoktól, például a magas frekvenciájú jelvonalaktól és a nagy teljesítményű alkatrészektől.
Szoftverszűrés feldolgozása
Miután összegyűjtöttük a nyers adatot az MPU-6050-ből, hozzáadhatunk egy szoftverszűrő linket a kezdeti adatok előkészítéséhez a zaj által kiváltott interferencia kiküszöbölésére.Az általánosan használt szoftverszűrési módszerek közé tartozik az átlagos szűrés, a medián szűrés, a Kalman szűrés stb.
Használjon belső aluláteresztő szűrőt
Az MPU-6050 belső integrált digitális alacsony áteresztési szűrővel rendelkezik, amely felhasználható a nagyfrekvenciás zaj csökkentésére a küszöbfrekvenciájának beállításával.Pontosabban, beállíthatjuk a digitális szűrő küszöbfrekvenciáját az MPU-6050 konfigurációs regiszterének módosításával, hogy kiküszöböljük az A/D mintavétel által okozott nagyfrekvenciás zajt.
MPU-6050-alapú mozgási pálya kiszámítása
Az MPU-6050 egy hattengelyes gyorsulásmérő és giroszkópérzékelő, amely felhasználható a tárgyak mozgásának és hozzáállásának mérésére.Az MPU-6050-en alapuló mozgási pálya számítása a következő lépésekkel valósítható meg:
Az első lépés az érzékelő adatok olvasása.El kell olvasnunk a gyorsulásmérő és a giroszkóp adatait az MPU-6050 érzékelőktől a megfelelő illesztőprogramok és könyvtári funkciók felhasználásával.Ezeket az adatokat általában digitális formátumban adják ki, tehát néhány konverziós és kalibrációs munkára van szükség ahhoz, hogy azokat fizikai egységek tényleges méréseire konvertálják.
A második lépés a gyorsulás kiszámítása.Először fel kell dolgoznunk a gyorsulásmérőből származó adatokat, hogy az objektum gyorsulását az egyes tengelyekben levezetjük.Ezt követően az objektum sebességének és elmozdulásának kiszámításához az egyes tengelyekben be kell integrálnunk a gyorsulási adatokat.A numerikus integrációs technikákat, például az Euler-módszert vagy a Lunger-Kutta módszert gyakran használják ebben a folyamatban az elmozdulás számításának pontosságának biztosítása érdekében.
A harmadik lépés a szögsebesség kiszámítása.A giroszkópos adatok felhasználásával kiszámítható az objektum szögsebessége az egyes tengelyekben.Ezeket az adatokat ismét kalibrálni és átalakítani, hogy a tényleges fizikai egységek szögsebességét elérjék.
A negyedik lépés a forgás kiszámítása.A szögsebesség -adatok integrálásával kiszámítható az objektum forgási szöge az egyes tengelyekben.Ez megtehető numerikus integrációs technikákkal, például Euler-módszerrel vagy a szög kiszámításához a Longe-Kutta módszerrel.
Az ötödik lépés az adatok egyesítése.Kombináljuk a gyorsulásmérőkből és a giroszkópokból származó adatokat, hogy teljes hozzáállást és helyzetinformációt szerezzünk az objektumból.Ez megtehető algoritmusok, például kvaterner-alapú hozzáállás-megoldó vagy Euler Angle Solver felhasználásával.
A hatodik lépés az eredmények megjelenítése.A kiszámított objektummozgás -mozgási pályát egy 3D -s koordinátarendszer pontkészletévé konvertáljuk, és azt megfelelő megjelenítő eszközökkel jelenítjük meg, hogy az objektum mozgáspályája és a hozzáállás változásainak intuitívabb megértése legyen.
Gyakran feltett kérdések [GYIK]
1. Mennyire pontos az MPU6050?
A megszerzett eredmények elegendő pontosságot mutattak az 1 % -nál kevesebb és a megbízhatóságot, biztosítva a lift tengelyének megfelelő méretezését és az emelőipar magas színvonalát.
2. Hogyan lehet olvasni az MPU6050 adatokat?
A belső MPU6050 nyilvántartások elolvasásához a Mester kezdési feltételeket küld, majd az I2C rabszolga címét és egy írási bitet, majd a regisztrációs címet, amelyet el fog olvasni.
3. Hol használják az MPU6050 -et?
A hordható egészségkövető, fitneszkövető eszközökben.Drónokban és quadcopterekben az MPU6050 -et használják a pozícióvezérléshez.A robotkar vezérléséhez használják.Kézi gesztusvezérlő eszközök.
4. Az MPU6050 IMU?
Az MPU6050 IMU érzékelő blokk az MPU-6050 érzékelő adatait olvassa el, amely a hardverhez van csatlakoztatva.A blokk kimenetele a gyorsulást, a szögsebességet és a hőmérsékletet az érzékelő tengelye mentén.
5. Mi az MPU6050 feldolgozása?
Ez az MPU6050 fedélzeti processzor, amely ötvözi a gyorsulásmérőből és a giroszkópból származó adatokat.A DMP az MPU6050 használatának kulcsa, és később részletesen ismertetjük.Mint minden mikroprocesszornál, a DMP -nek firmware -re van szüksége a futtatáshoz.
működési teszt.A legmagasabb költséghatékony termékek és a legjobb szolgáltatás az örök elkötelezettségünk.
Forró cikk
- CR2032 és CR2016 cserélhetőek
- MOSFET: Meghatározás, munka elv és kiválasztás
- Relé telepítése és tesztelése, a relé bekötési rajzok értelmezése
- CR2016 vs. CR2032 Mi a különbség
- NPN vs. PNP: Mi a különbség?
- ESP32 vs STM32: Melyik mikrovezérlő jobb az Ön számára?
- LM358 kettős operatív erősítő Átfogó útmutató: Pinouts, áramkörök, ekvivalensek, hasznos példák
- CR2032 vs DL2032 vs CR2025 összehasonlító útmutató
- Az ESP32 és az ESP32-S3 műszaki és teljesítmény-elemzések megértése
- Az RC sorozat áramkörének részletes elemzése
 Az NRF24L01 kommunikációs chip képességeinek és alkalmazásainak feltárása
Az NRF24L01 kommunikációs chip képességeinek és alkalmazásainak feltárása
2024-04-25
 MMBT3904 NPN tranzisztor: annak specifikációi, átfogó alkalmazási útmutatója és MMBT3904 vs. MMBT5551
MMBT3904 NPN tranzisztor: annak specifikációi, átfogó alkalmazási útmutatója és MMBT3904 vs. MMBT5551
2024-04-25
Forró cikkszám
 QMK212BJ103KG-T
QMK212BJ103KG-T GRM0225C1E180JA02L
GRM0225C1E180JA02L 08055A160GAT2A
08055A160GAT2A 06035A220G4T2A
06035A220G4T2A LD025C471KAB2A
LD025C471KAB2A TAP335K020CRW
TAP335K020CRW TAP685M025SRW
TAP685M025SRW 1N4001-T
1N4001-T ATV2500BL-20JC
ATV2500BL-20JC IS82C59A-12
IS82C59A-12
- MAX16833AUE/V+T
- A8582KLPTR-T
- V375B24C300BL
- MAX1802EHJ+
- VI-J03-IZ
- SKM200GA128DS
- AD9265BCPZ-80
- TLV7211AIDBVR
- NLV74VHCT244ADTRG
- LTC3883EUH#PBF
- TPA321DGNRG4
- FSV10100V
- T491B106K004AT
- CAT35C104K
- HD64F38344HV
- HYB18T1G800C2F-25F
- IDT7007S35J
- M24C04-RDW
- MC33092ADW
- MSM51V17405F-60TFSR1
- S1A0429A01-SOBO
- ST92F120V1Q7C
- TA2015FN
- XC9223B082AR
- CXD3009Q
- G548A1F51U
- M37760EFHGP
- RAA730300DFP
- TIT201AS
- HERAF1603G
- S71WS128PBOHH3SR0A
- SD25-0836R9UBXX06
- A5S55-CO-RH
- FS32K146UAT0VLL
- L2A2804-013
- PS8803CQFN52GTR-AZ
- K3RG4G40MM-MGCJ
- PCA9533DP/01
- Z84C0006FEC-Z80